Picobug
A Mesoscale Robot that can Run, Fly, and Grasp
 The agility and ease of control make a quadrotor aircraft an attractive platform for studying swarm behavior, modeling, and control. The energetics of sustained flight for small aircraft, however, limit typical applications to only a few minutes. Adding payloads – and the mechanisms used to manipulate them – reduces this flight time even further. To solve this problem, we envisioned, designed and fabricated a novel robot platform having three main capabilities: walking, grasping, and flight.
The agility and ease of control make a quadrotor aircraft an attractive platform for studying swarm behavior, modeling, and control. The energetics of sustained flight for small aircraft, however, limit typical applications to only a few minutes. Adding payloads – and the mechanisms used to manipulate them – reduces this flight time even further. To solve this problem, we envisioned, designed and fabricated a novel robot platform having three main capabilities: walking, grasping, and flight.
This new robotic platform merges one of the world’s smallest quadrotor aircraft with a lightweight, single-degree-of-freedom walking mechanism and an SMA-actuated gripper to enable all three functions in a 30g package. The resulting Picobug has increased mission life and capabilities through the combination of the functionalities of legged and aerial robots.
Physical test vehicles

Tech Specs
| Compute |
|
|---|---|
| Sensors |
|
| Communication Link |
900MHz Zigbee 802.15.4
or 2.4 GHz nRF |
| Propulsion System |
|
| Power |
|
| Dimensions | 65mm diagonal motor-motor |
| All up Weight | 30g |
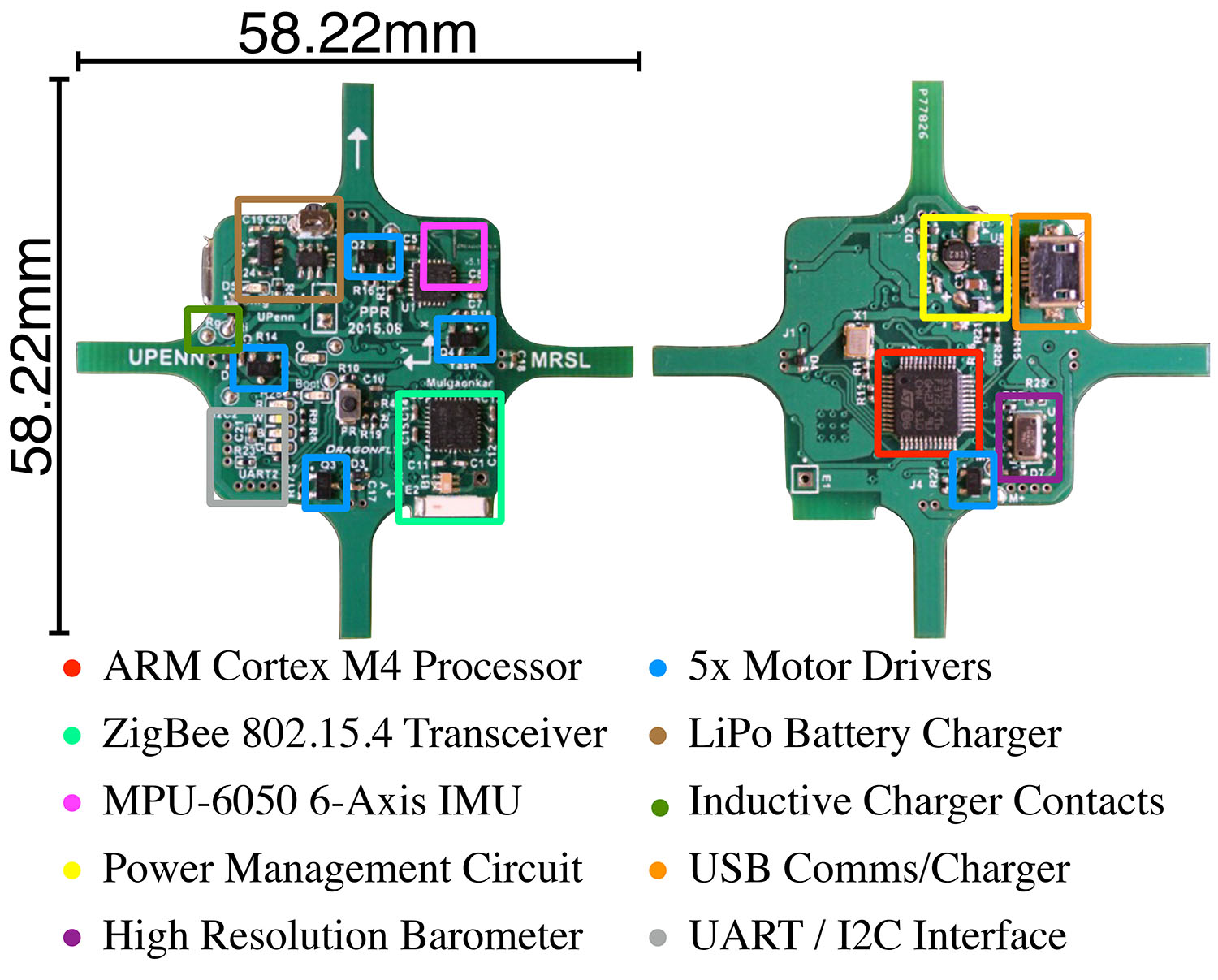
Components of the Picobug autopilot