Hummingbird - Stereo
Vision-Based State Estimation and Trajectory Control Towards High-Speed Flight with a Quadrotor
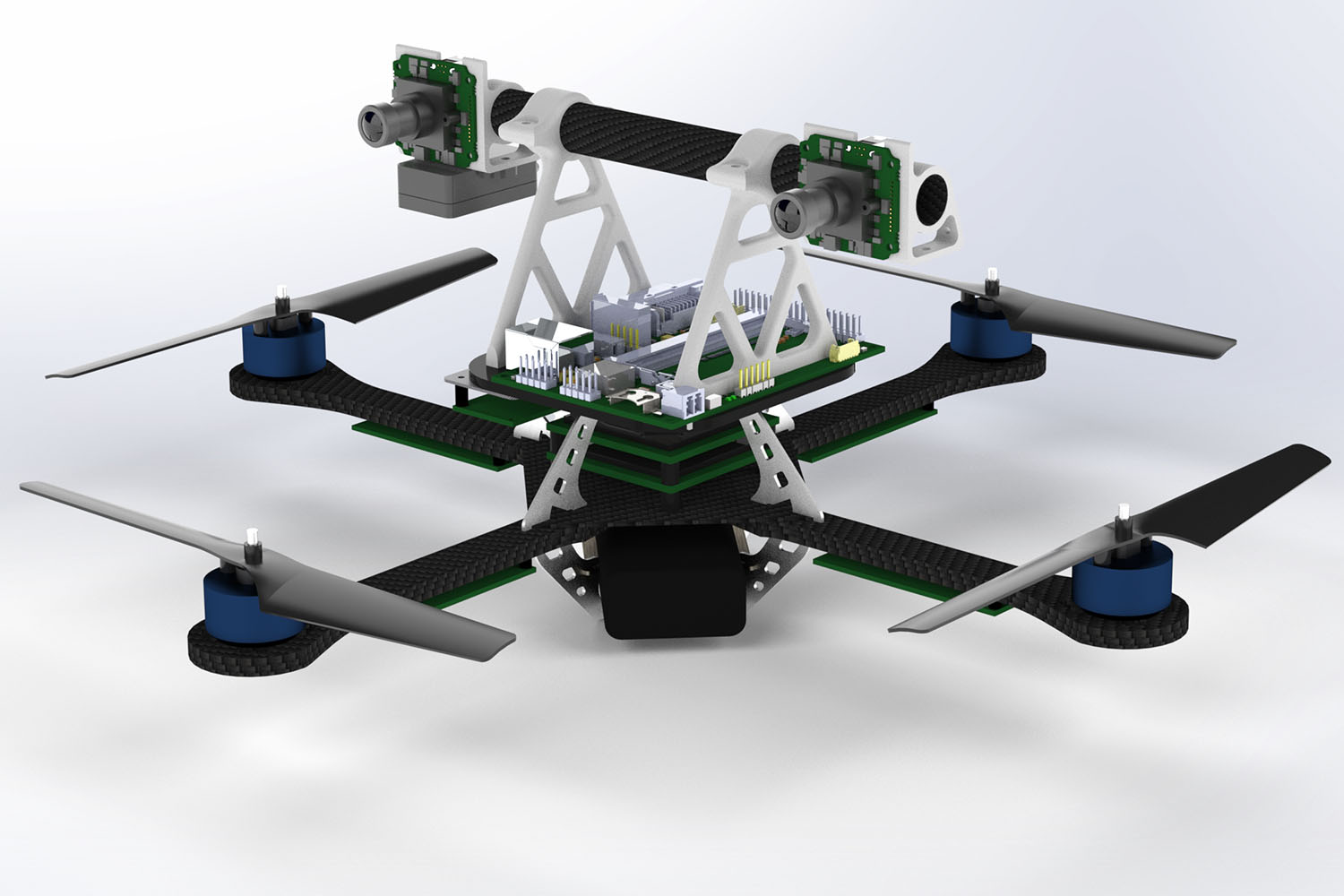 We designed a lightweight autonomous quadrotor that uses cameras and an inexpensive IMU as its only sensors and onboard processors for estimation and control. We developed a fully-functional, integrated system with a focus on robust visual-inertial state estimation, and demonstrate the quadrotor’s ability to autonomously travel at speeds up to 4 m/s and roll and pitch angles exceeding 20◦. We validated the performance of the proposed system via challenging experiments in three dimensional indoor environments.
We designed a lightweight autonomous quadrotor that uses cameras and an inexpensive IMU as its only sensors and onboard processors for estimation and control. We developed a fully-functional, integrated system with a focus on robust visual-inertial state estimation, and demonstrate the quadrotor’s ability to autonomously travel at speeds up to 4 m/s and roll and pitch angles exceeding 20◦. We validated the performance of the proposed system via challenging experiments in three dimensional indoor environments.
Physical test vehicle

Tech Specs
| Compute |
|
|---|---|
| Sensors |
|
| Communication Link | 2.4GHz 802.11n WiFi |
| Propulsion System |
|
| Power |
|
| Dimensions | 540 x 540 x 85.5 mm |
| All up Weight | 740g |