Hello World!▮
As of , I am in the process of updating the content on my website.Please check back soon. Thanks.
Forbes 30 Under 30 for Science!
I am writing to express my sincere gratitude to Forbes and their panel of judges for selecting me for their 2016 Forbes #30Under30 list for Science. I am deeply humbled to have been chosen for such a prestigious honor. I want to sincerely thank my family and friends for the continued unwavering support and encouragement.
![]()
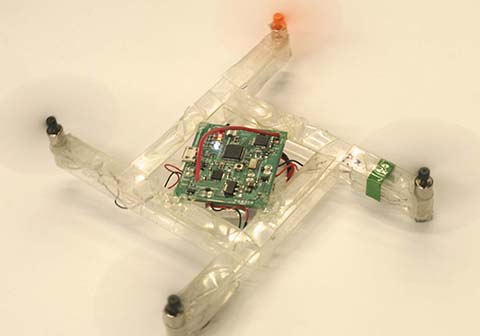
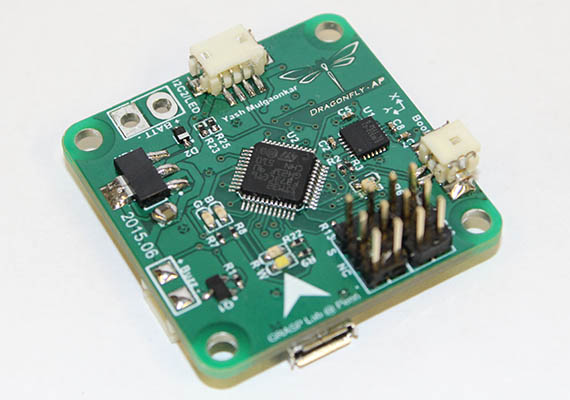
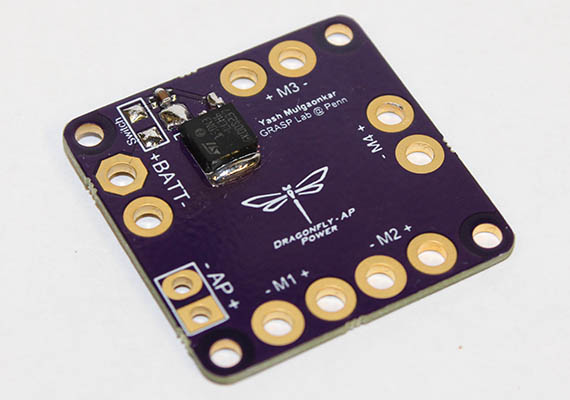
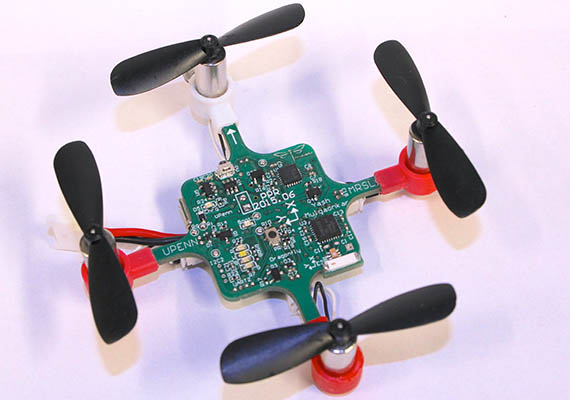
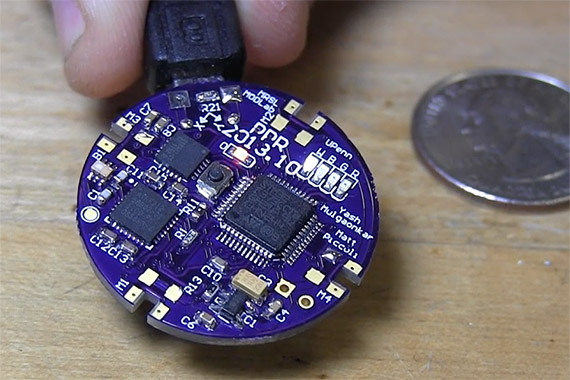
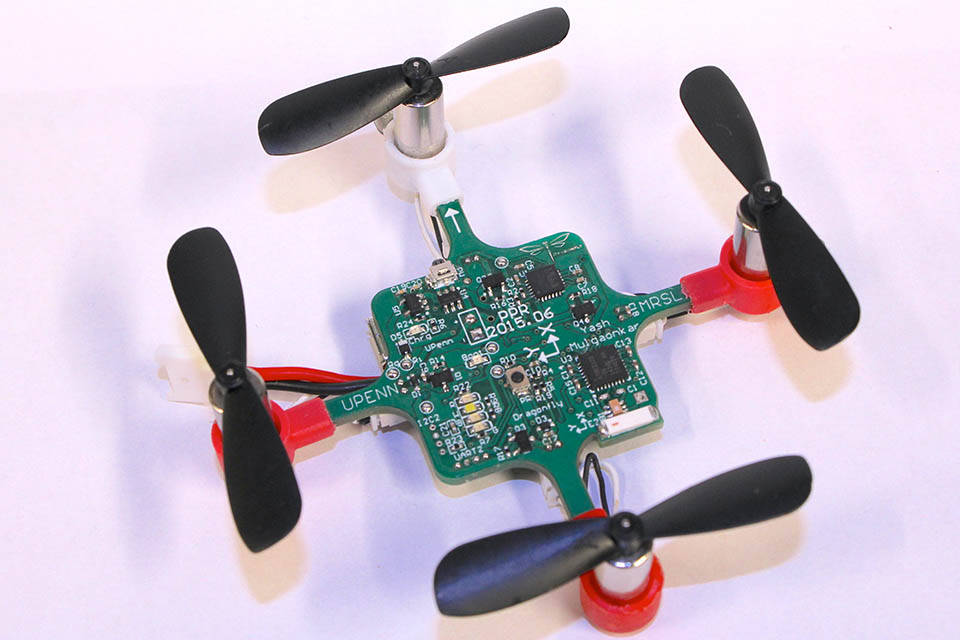
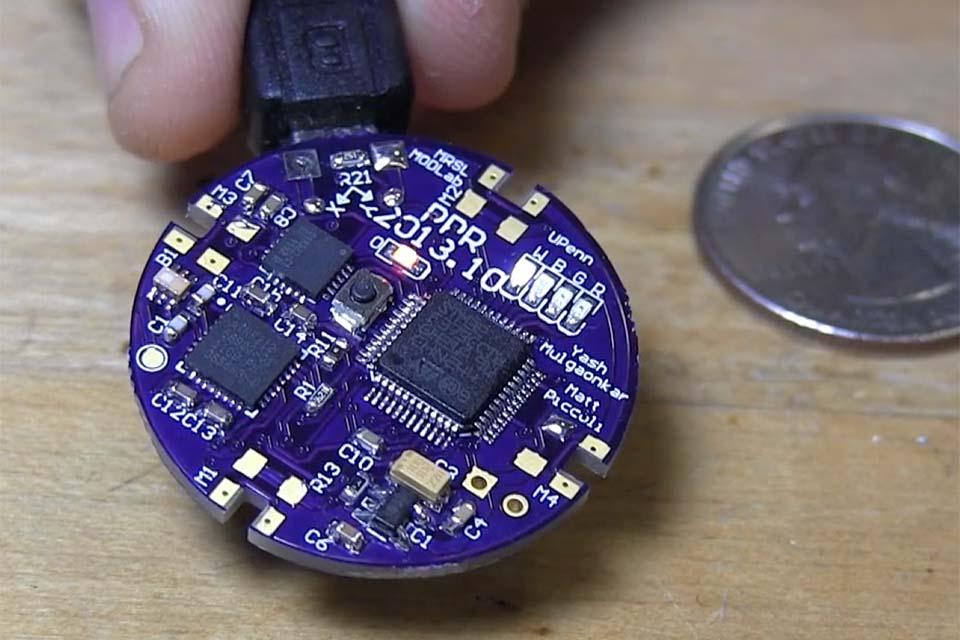
I am a PhD student at The School of Engineering and Applied Science at the University of Pennsylvania under the mentorship of Prof. Vijay Kumar. My research at The GRASP Lab here, is focused on low-cost, rapid fabrication methods and embedded design for building “pico scale” MAVs. I have also developed systems for extending their mission life for fully autonomous multi-agent persistent aerial missions through task distribution and automated charging.
I have a Master's degrees in Robotics from the University of Pennsylvania, and a Bachelor's degree in Electrical Engineering from the University of Mumbai in India.
You can download a plain text version of my Bio here.
Research Areas
- Robotics
- Mechatronics
- SWaP Constraint Optimization in Robots
- Product Design
- Embedded Systems
- Unmanned Aerial Vehicles (UAV)
- Health Management in UAVs
- Alternative Power Sources for UAVs
- Articulated Manipulator Design for UAVs
- Robotic Haptic Exploration






























































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}