Pico Quadrotor
Design of small, safe and robust quadrotor swarms
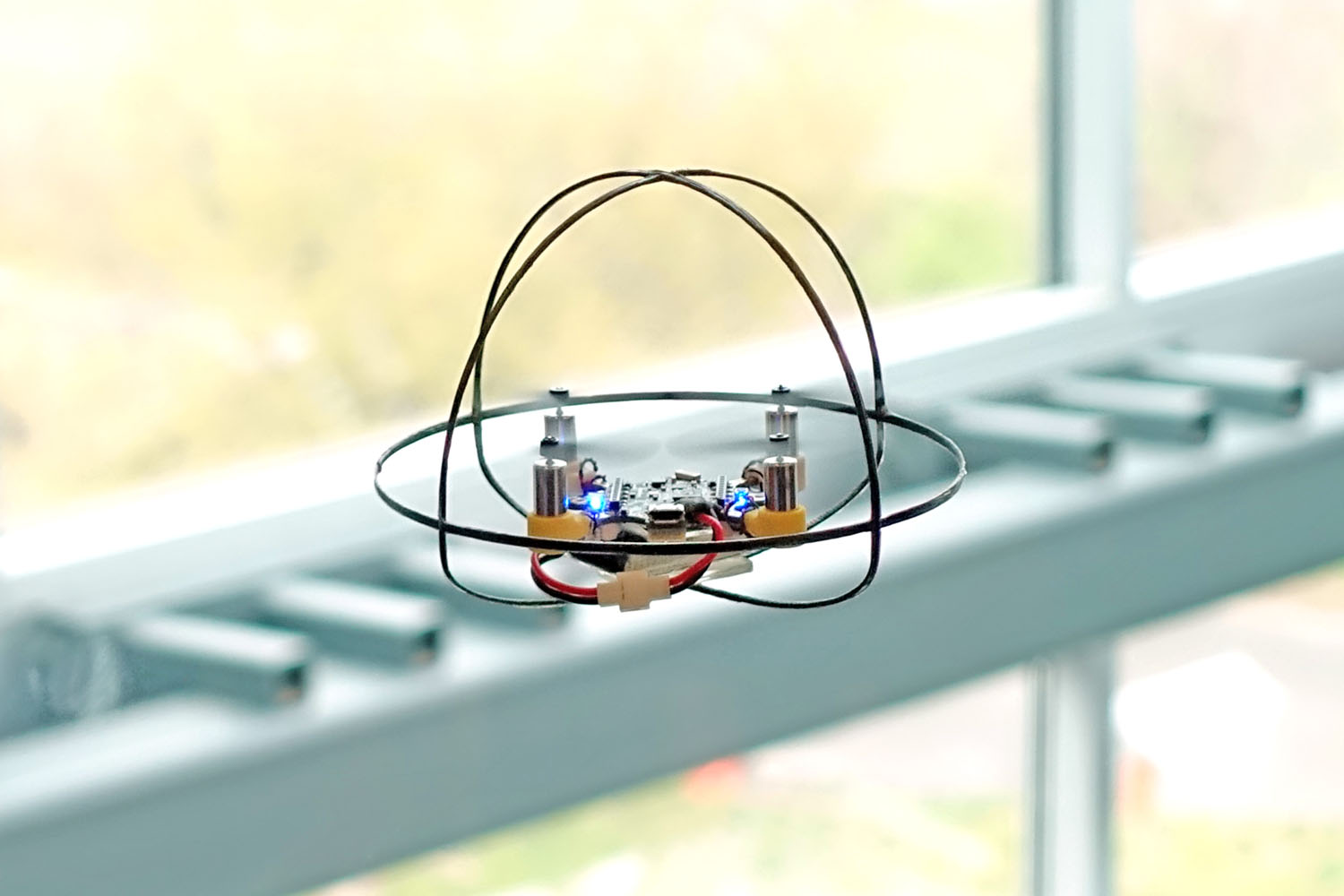 Scaling down the size and mass of micro aerial vehicles (MAVs) increases their agility and their ability to operate in tight formations. In addition, smaller robots are safer and more robust to collisions. To substantiate these claims, I designed and fabricated the pico quadrotor measuring 11 cm from tip to tip, with a mass of 25g. To increase the robustness of the robot to collisions, we designed a 2 gram carbon fiber cage that protects it from impact velocities in excess of 4 m/s and also permits recovery after collisions.
Scaling down the size and mass of micro aerial vehicles (MAVs) increases their agility and their ability to operate in tight formations. In addition, smaller robots are safer and more robust to collisions. To substantiate these claims, I designed and fabricated the pico quadrotor measuring 11 cm from tip to tip, with a mass of 25g. To increase the robustness of the robot to collisions, we designed a 2 gram carbon fiber cage that protects it from impact velocities in excess of 4 m/s and also permits recovery after collisions.
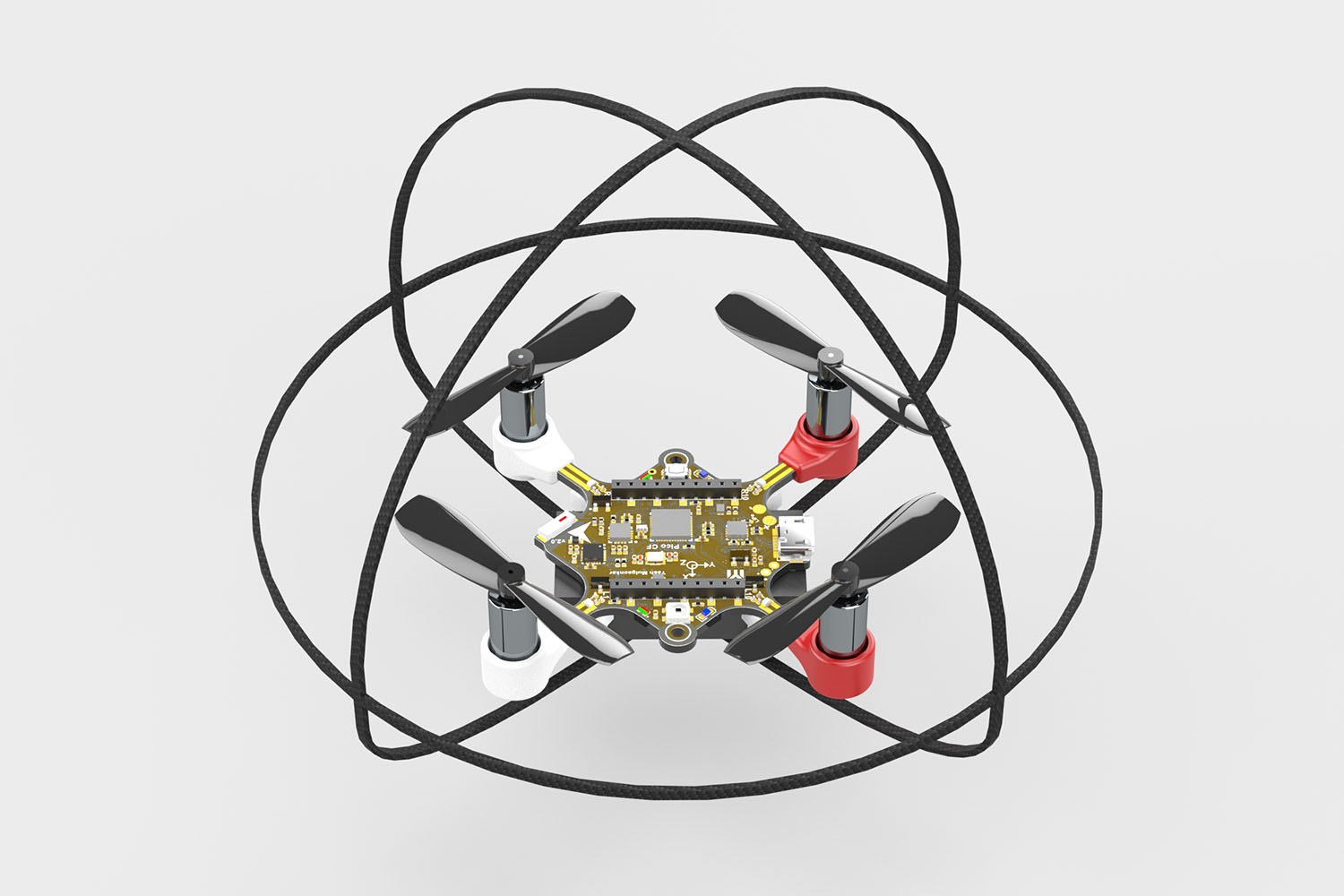
Initial CAD Render
Tech Specs
| Compute |
|
|---|---|
| Sensors |
|
| Communication Link |
900MHz Zigbee 802.15.4
or 2.4 GHz nRF |
| Propulsion System |
|
| Power |
|
| Dimensions | 65mm diagonal motor-motor |
| All up Weight | 25g |
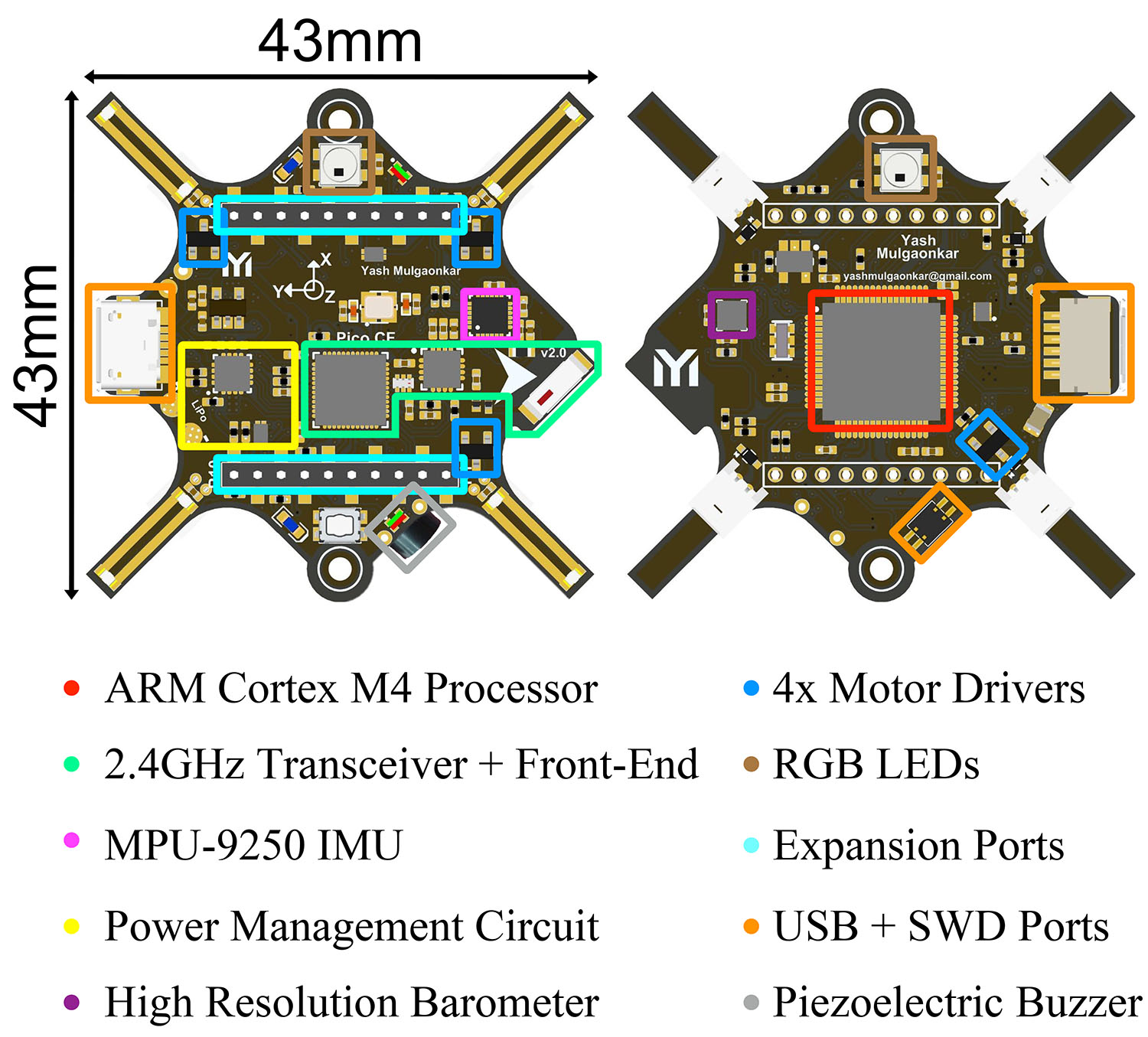
Components of the Pico Quadrotor autopilot